A gyalogos érzékelő rendszer leírása és működése
Tartalom
Az autógyártók fáradhatatlanul dolgoznak az összes közlekedő biztonságának javításán és a sérülések kockázatának minimalizálásán. Az egyik módszer a gyalogosokkal való ütközések elkerülése. Az alábbiakban bemutatjuk a gyalogos érzékelő rendszerek jellemzőit, azok elrendezését és működését, valamint az ilyen megoldások használatának előnyeit és hátrányait.
Mi a gyalogos érzékelő rendszer
A gyalogos észlelő rendszert úgy tervezték, hogy megakadályozza vagy minimalizálja a közúti közlekedőkkel való ütközés következményeit. Ez a funkció nem képes 0% -ra csökkenteni az incidensek számát, de használata 20% -kal csökkenti a balesetekben bekövetkezett halálesetek arányát, és 30% -kal csökkenti a súlyos sérülések valószínűségét is.
A fő nehézség a logikai megvalósítás összetettségében rejlik. A gyalogosok észlelésére szolgáló programok és technikai eszközök használatával nincsenek problémák. Nehézségek merülnek fel a mozgás irányának és az emberi viselkedés előrejelzésének szakaszában egy kritikus helyzetben, amikor az életmentésről van szó.
A rendszer célja és funkciói
A rendszer fő célja, hogy megakadályozza a jármű ütközését egy gyalogossal. A teszt eredményei azt mutatták, hogy a megoldás tökéletesen működik 35 km / h sebességig, és az ütközések akár 100% -át is kiküszöböli. Amikor az autó gyorsabban halad, a rendszer nem tudja helyesen felismerni a tárgyakat és időben reagálni, így a teljes biztonság nem garantált. A rendszer fő funkciói:
- a gyalogosok felderítése;
- a veszélyes helyzetek elemzése és az ütközés valószínűségének értékelése;
- a vezető figyelmeztetése a fenyegetésről;
- a sebesség automatikus csökkentése vagy a mozgás pályájának megváltoztatása;
- a jármű teljes leállítása.
Milyen elemekből áll a rendszer?
A rendszert a jármű speciális szoftverrel és hardverrel történő felszerelésével lehet működtetni. Magába foglalja:
- Elülső kamera és radarok - pásztázza az utat a jármű előtt és ismerje fel a 40 méterre lévő tárgyakat.
- A vezérlőegység egy elektronikus eszköz, amely információkat fogad a gyalogos érzékelő eszközöktől. Az egységet a rendszer konfigurálására és vezérlésére tervezték, valamint ütközésveszély esetén értesítette a vezetőt.
- Szoftver - felelős a gyalogosok és más tárgyak felismeréséért, az előrejelzés helyességéért és a helyzet elemzéséért, a sürgős esetekben döntések meghozataláért.
A modern rendszerek technikai megvalósítása lehetővé teszi az út állapotának, az akadályok jelenlétének elemzését és a biztonságos pálya kiszámítását.
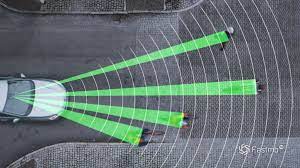
Logika és működési elv
A gyalogos érzékelő rendszer 40 méteres körzetben vizsgálja a területet. Ha az objektumot a kamera érzékeli, és ezt a radar megerősíti, akkor folytatja a követést és megjósolja a mozgást. Amikor a helyzet eléri a kritikus szintet, a járművezető hallható értesítést kap. A reakció hiánya kiváltja az automatikus fékezést, a pálya megváltoztatását vagy a jármű leállítását. A gyalogosok felismerésére az alábbi elvek egyikét alkalmazzák:
- teljes vagy részleges detektálás;
- minták keresése az adatbázisból;
- több kamera eredményeinek felhasználásával.
A nagyobb hatás érdekében többféle lehetőség van kombinálva, ami garantálja a hibák és a munkában előforduló hibák minimalizálását.
Megnevezés és különbségek a különböző gyártók rendszerei között
Kezdetben a Volvo a gyalogos közlekedés biztonságára gondolt, majd hasonló rendszerek jelentek meg a TRW -nél és a Subaruban.
- A Volvo gyalogosfelismerő rendszere (PDS) - egy kamera használatával olvassa el a területet.
- Fejlett gyalogosérzékelő rendszer (APDS) TRW-kamerával és radarral.
- Subaru EyeSight - két kamera és radar nincs az utak felismerésére.
A műszaki megvalósítástól függetlenül minden rendszer hasonló működési elvvel és egy céllal rendelkezik.
Előnyök és hátrányok
A technikai megoldás kényelmesebbé és biztonságosabbá teszi az autóutazást. A gyalogos érzékelő rendszer fő előnyei:
- a balesetek számának csökkentése;
- 100% -os ütközések megelőzése 35 km / h sebességig;
- a veszélyes sérülések és a balesetek halálozásának csökkentése;
- fokozott közlekedésbiztonság.
A hiányosságok közül érdemes megjegyezni:
- a rendszerek korlátozott választéka;
- a nagy sebességgel végzett munka bonyolultsága;
- magas ár.
A technológia fejlődésével ezek a problémák megszűnnek.
A gyártók önvezető autók iránti törekvése és a közúti biztonság kevesebb balesetet eredményez. Remélhetőleg a jövőben javulni fog az objektumok felismerésének, a fenyegetés előrejelzésének és az ütközések elkerülésének minősége. Ez nagy sebességnél is elkerülheti a baleseteket.
